What Is RTK, and Why Does Every Outdoor Robot Need It?
Real-Time Kinematic positioning has been quietly underpinning precision industries for thirty years. Here is how it actually works, and why centimeters are the difference between a useful robot and an expensive one
Standard GPS is good enough to get you to a restaurant. It is not good enough to tell a robot mowing a lawn exactly where the property line is, to guide a tractor down a crop row without overlap, or to tell a construction grader how deep to cut. The problem is not that GPS is broken; it is that the satellite signals are subject to errors that accumulate in ways that matter enormously when the task requires precision measured in centimeters rather than meters.
Real-Time Kinematic positioning, almost always shortened to RTK, is the technique that closes this gap. It has been deployed commercially since the early 1990s and is now foundational infrastructure for precision agriculture, construction, surveying, drones, autonomous vehicles, and outdoor robotics. If a machine needs to know where it is to within a couple of centimeters in real time, RTK is almost certainly how it does it.
The Problem with Standard GPS
A standard GPS or GNSS receiver determines its position by measuring how long it takes signals to arrive from multiple satellites. The calculation sounds straightforward, but those signals travel through the atmosphere before they reach the receiver, and the atmosphere introduces errors. Signals slow down as they pass through the ionosphere and the troposphere in ways that are difficult to predict precisely, because atmospheric conditions vary by location, altitude, time of day, and solar activity. The receiver hardware itself also introduces small biases. Add everything up and a standard GPS receiver is accurate to somewhere between two and five meters under good conditions, and considerably worse in urban areas with signal obstructions.
For navigation on a phone, two to five meters of error is irrelevant. For a tractor making pass after pass across a field, that error means the rows overlap by unpredictable amounts, wasting seed, fertilizer, and fuel. For a robot mowing a commercial property, it means the machine cannot reliably follow a boundary. For a construction grader, it means the cut depth is wrong. The same atmospheric error that you never notice while driving to dinner becomes a real operational problem the moment precision is the job.
How RTK Solves It
The technical mechanism relies on a property of GPS signals called carrier phase measurement. Standard GPS receivers use the coarser timing information in the signal, called the code, to estimate position. RTK receivers use the much finer carrier wave itself, which has a wavelength of about 19 centimeters for the L1 signal. By measuring how many complete cycles of that wave have passed and tracking the fraction of a cycle, the receiver can resolve position far more precisely than code-based measurements allow.
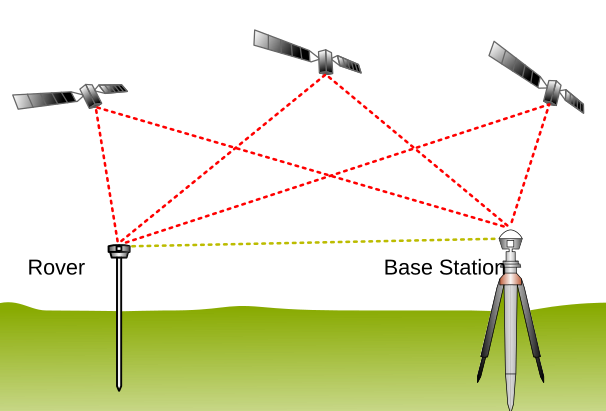
The base station, sitting on a survey-grade monument or a precisely surveyed point, receives the same satellite signals and compares what it calculates to what it knows its actual position to be. The difference is the current error introduced by the atmosphere and other sources. It packages that correction data and broadcasts it, typically over a radio link for short-range applications or over the internet using the NTRIP protocol for network-based services. The rover receives those corrections and applies them in real time, arriving at a position that is accurate to between one and two centimeters horizontally.
The process of resolving the initial carrier phase ambiguity, called integer ambiguity resolution, takes a short initialization period when the rover first connects to corrections, typically a few seconds to a minute depending on conditions and receiver quality. Once resolved, the rover maintains centimeter accuracy as long as it maintains signal lock on enough satellites and continues receiving corrections.
Single Base vs. Network RTK
Single Base Station
The original RTK setup pairs one rover with one base station. The base can be a receiver the operator installs temporarily on a known point for the duration of a job, or a permanently installed reference station at a fixed location. The key constraint is distance: RTK accuracy degrades as the rover moves further from the base station, because atmospheric conditions at the two locations begin to diverge. Performance holds well within about 30 to 50 kilometers, and is at its best within 10 to 20 kilometers.
Single base setups are practical for contained operations. A farm with all its fields within range of a single permanently installed base station runs reliably and cheaply once the base is in place. A construction site can deploy a temporary base at the start of the job and remove it when finished. The limitation is geographic coverage; a single base cannot follow a robot or vehicle that operates across a wide area.
Network RTK
Network RTK, sometimes called VRS or NRTK, addresses the geographic limitation by using a network of base stations distributed across a region. Software in the network combines observations from multiple stations to model atmospheric conditions across the entire covered area, then generates a virtual correction stream optimized for wherever the rover actually is. The rover does not connect to a single base; it connects to a central server that delivers corrections tailored to its current location.
From the user's perspective, network RTK eliminates the need to own, install, or maintain any base station hardware. The rover needs only a cellular data connection to subscribe to the correction stream. From an infrastructure perspective, someone still has to own, install, and maintain all those base stations, which is why network RTK services exist as subscription businesses and why the coverage map, station density, and uptime commitments matter when evaluating providers.
RTK Across Industries
RTK has been deployed commercially since the early 1990s and is now used across a surprisingly wide range of industries. The specific application changes but the underlying requirement is always the same: standard GPS is not accurate enough for the task at hand.
RTK in Outdoor Robotics Specifically
For outdoor autonomous robots, RTK occupies a specific role in a broader sensor stack. Most outdoor robots combine RTK with an Inertial Measurement Unit in an INS configuration, where the IMU provides high-frequency dead reckoning between GPS updates, and RTK provides absolute position corrections to prevent IMU drift from accumulating. LiDAR and cameras handle obstacle detection and local navigation, but they do not give a robot a precise absolute position on a map. RTK does.
This matters for repeatability as much as accuracy. A robot mowing the same property every week needs to follow the same path with centimeter consistency each time. A delivery robot needs to know which doorstep it is at, not just which general house. An inspection drone needs to return to the exact same vantage points across repeated flights so that images can be compared over time. All of these requirements depend on an absolute position reference that is consistent across sessions and locations, which is precisely what RTK provides.
The operational challenge specific to outdoor robots is that RTK infrastructure cannot be taken for granted in the same way warehouse Wi-Fi or indoor positioning systems can. A robot deployed in a location with no correction network coverage, or where cellular connectivity is unreliable, loses its centimeter accuracy and may fall back to meter-level positioning that is insufficient for the task. This infrastructure dependency is increasingly a product decision for outdoor robotics OEMs, not just an engineering detail.
RTK Accuracy in Practice
It is worth being specific about what those accuracy numbers mean in practice. Centimeter accuracy is the steady-state performance once the system has initialized and maintains satellite lock. During the initialization period while integer ambiguity resolution completes, accuracy is lower. In environments with signal obstructions, such as tree canopy, tall buildings, or equipment shading satellites, accuracy can degrade or initialization can fail entirely if too few satellites are visible. Modern multi-constellation receivers that track GPS, GLONASS, Galileo, and BeiDou simultaneously reduce this vulnerability by having more satellites available at any given moment.
Solar activity presents a periodic challenge that the industry has been working to address. During periods of elevated solar activity, ionospheric disturbances can disrupt RTK signal quality significantly. Trimble introduced IonoGuard technology specifically to address this during Solar Cycle 25, which has produced some of the most disruptive solar events in recent years for precision positioning.
So What?
RTK is not new technology. It has been quietly running precision agriculture, construction, and surveying for three decades. What is new is that the cost of RTK receivers has dropped dramatically, network correction services have proliferated, and outdoor robotics has emerged as a major new category of deployment. The infrastructure question that used to be a surveying problem is now a robotics product problem. Understanding how RTK works is the first step to understanding why getting corrections to a robot in the field is a harder and more consequential challenge than it might look from the outside.
Thanks for reading! Consider checking our News feed
Read more on RTK
Real-Time Kinematic positioning -- Wikipedia
NTRIP protocol -- Wikipedia
What Is RTK? -- Point One Navigation
Achieve Precision with GEODNET's Cost-Effective RTK Global Network -- GPS World
History of RTK Part 4: Birth of a Utility -- The American Surveyor
Best NTRIP Service Providers -- Point One Navigation
Precision Agriculture Grows with RTK -- GPS World